이전 포스팅에서는 아틱 IDE를 이용한 LED를 깜빡이는 예제를 구현해보았습니다.
본 튜토리얼의 전체 PDF는 다음의 링크에서 참고하실 수 있습니다.
https://goo.gl/JVMp9q
ARTIK IDE로 사용하는 방법은 본 튜토리얼의 이전 포스트를 참고해주세요.
이번에는 아두이노 IDE를 사용해보도록 하겠습니다.
2) Arduino IDE를 사용하는 경우
SYSFS는 리눅스에서 디바이스와 관련된 정보를 표현하기 위한 파일 시스템으로 system file system입니다. 아틱에서 사용하는 GPIO (General purpose input and output)의 핀들을 지정하기 위해서 SYSFS mapping과 Arduino Pin의 번호로 지정을 합니다.
SILK-SCREEN PRINTING
| SYSFS MAPPING
| ARDUINO PIN
|
GPIO0
| 128
| 2
|
GPIO1
| 129
| 3
|
GPIO2
| 130
| 4
|
GPIO3
| 46
| 5
|
GPIO4
| 14
| 6
|
GPIO5
| 41
| 7
|
GPIO6
| 25
| 8
|
GPIO7
| 0
| 9
|
GPIO8
| 26
| 10
|
GPIO9
| 27
| 11
|

ON-BOARD DEVICE
| SYSFS MAPPING
|
RED LED
| 28
|
BLUE LED
| 38
|
SW403
| 30
|
SW404
| 32
|
터미널을 사용하여 (PuTTY 혹은 ARTIK IDE) 다음의 패키지들을 설치합니다. 아틱에 와이파이가 연결되어 있어야 합니다. 그렇지 않다면, 랜선으로 이더넷 연결을 해야 합니다.
sudo apt-get update sudo apt-get upgrade sudo apt-get install build-essential sudo apt install libc6-armhf-cross sudo apt install libstdc++6-armhf-cross cd /lib cp -r /usr/arm-linux-gnueabihf/ . ln -s /lib/arm-linux-gnueabihf/lib/ld-linux-armhf.so.3 ld-linux-armhf.so.3 ln -s /lib/arm-linux-gnueabihf/lib/libc.so.6 libc.so.6 ln -s /usr/arm-linux-gnueabihf/lib/libgcc_s.so.1 libgcc_s.so.1 ln -s /lib/arm-linux-gnueabihf/lib/libm.so.6 libm.so.6 ln -s /lib/arm-linux-gnueabihf/lib/libpthread.so.0 libpthread.so.0 ln -s /lib/arm-linux-gnueabihf/lib/librt.so.1 librt.so.1 ln -s /usr/arm-linux-gnueabihf/lib/libstdc++.so.6 libstdc++.so.6 |
끝으로, 다음의 명령어도 터미널에 입력합니다.
curl downloads.arduino.cc/libArduino/install_artik_prereq.sh | sh
이제, 아두이노를 설치합니다.
아두이노 소프트웨어 다운로드를 받습니다: https://www.arduino.cc/en/Main/Software
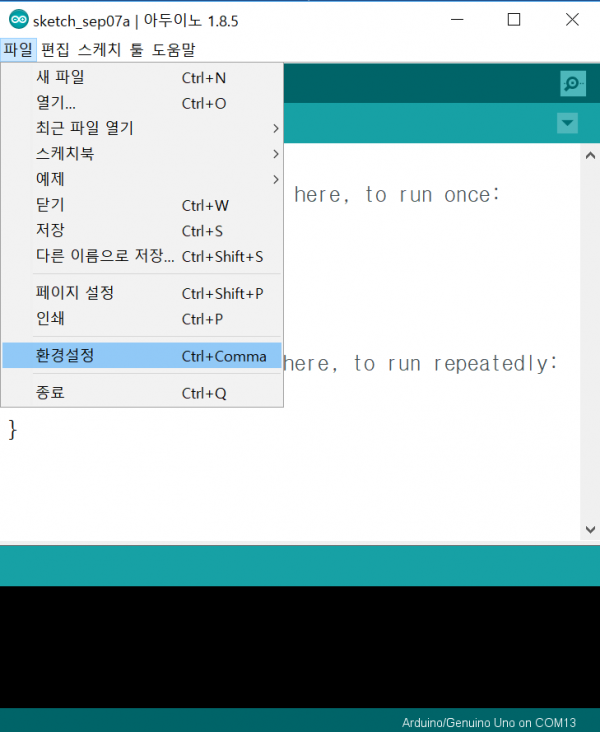
아두이노 프로그램을 PC/노트북에 설치한 후에 파일 – 환경설정으로
들어갑니다.
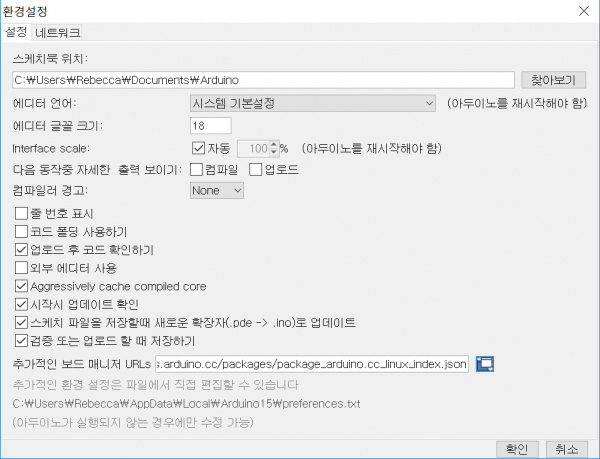
환경설정에서 추가적인 보드 매니저 URLs에 다음의 주소를 복사해서 붙여넣습니다.
http://downloads.arduino.cc/packages/package_arduino.cc_linux_index.json
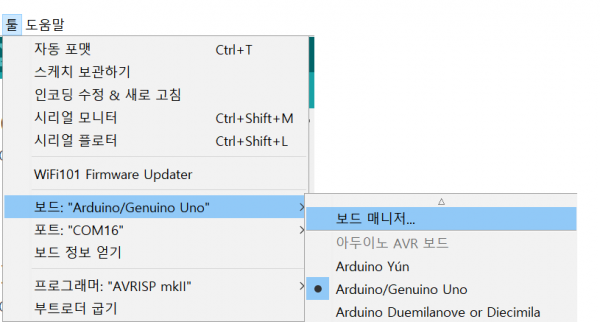
툴 – 보드에서 보드 매니저를 선택합니다.
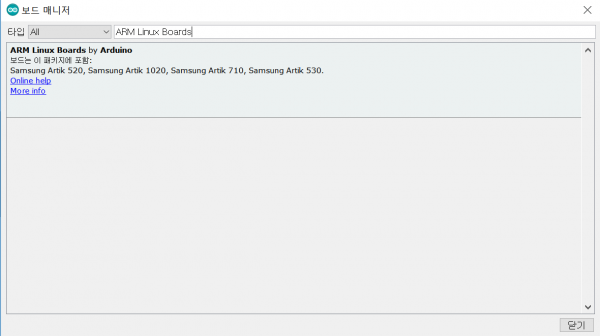
ARM Linux Boards로 검색을 하고, 설치합니다.
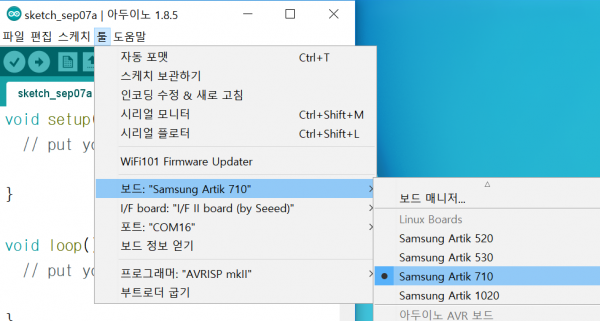
설치가 완료된 후, 툴 – 보드에서 Samsung Artik 710을 클릭하고, 포트 설정을 합니다.
터미널에서 /root/watcher를 입력합니다. 그러면, 아두이노에서 새로운 시리얼 포트를 통한 입력 및 와이파이를 통한 업로딩이 가능합니다. 새로운 시리얼 포트는 아틱의 OTG에 마이크로 USB 케이블을 연결해서 설정할 수 있습니다.

와이파이로 업로드를 해봅니다.

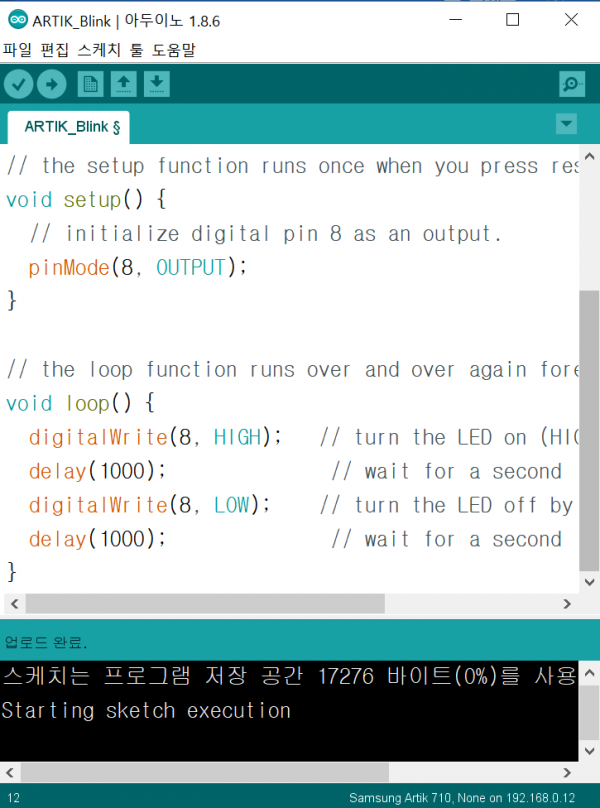
기본 예제인 다음의 코드를 입력하고 업로드를 해봅니다.
|
// the
setup function runs once when you press reset or power the board
void
setup() {
// initialize digital pin 8 as an output.
pinMode(8, OUTPUT);
}
// the
loop function runs over and over again forever
void loop()
{
digitalWrite(8, HIGH); // turn the LED on (HIGH is the voltage
level)
delay(1000); // wait for a second
digitalWrite(8, LOW); // turn the LED off by making the voltage
LOW
delay(1000); // wait for a second
}
|
기본 패스워드인 root를 입력합니다.
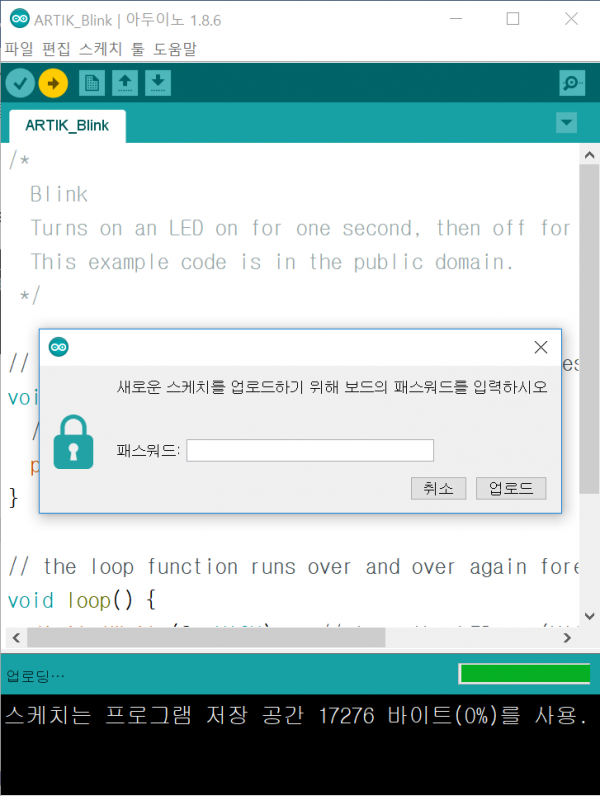
업로드가 완료된 것을 확인할 수 있습니다.

















최신댓글