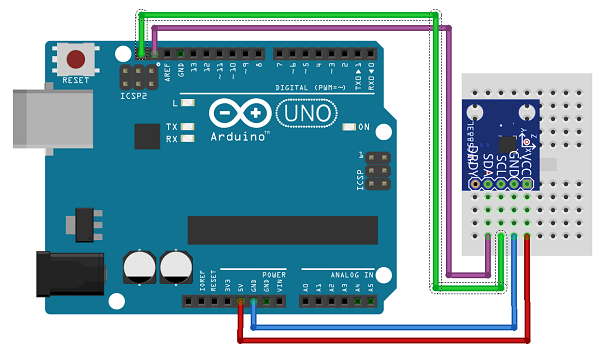
QMC5883L 로 방위각 구해 보기! /아두이노/나침반/지자계/HMC5883L/QMC5883L안녕하세요 메카솔루션입니다. 이번에는 아두이노 지자계 센서 모듈인 QMC5883L(HMC5883L 대체 버전) 에서 방위각을 구하는 방법을 알아보고자 합니다. http://blog.naver.com/roboholic84/221002707148 이전에 작성 되었던 QMC5883L 라이브러리에 방위각을 읽는 기능이 추가되어 블로깅을 새로이 하게 되었습니다. 이전에 라이브러리를 사용하시던 적이 있다면 새로 다운로드 해주셔야 합니다. https://github.com/mechasolution/Mecha_QMC5883L.git # 회로도 알아보기 기본 회로도와 동일합니다.
# 소스코드 알아보기
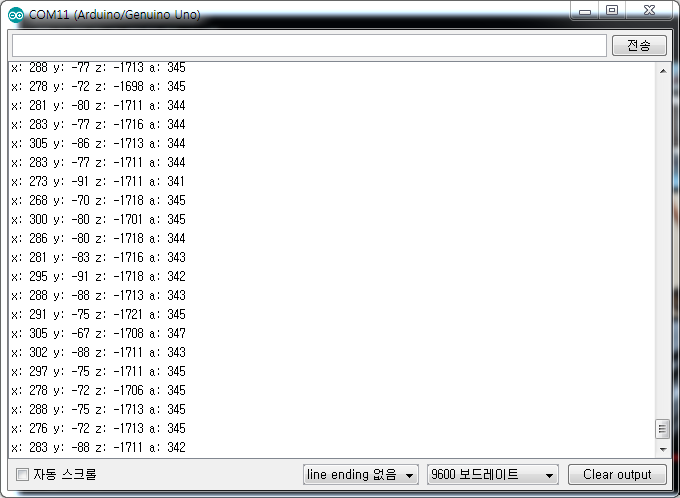
위와 같이 작성 되었습니다. azimuth 변수는 방위각 (degree) 을 나타내며 X축 기준으로 표시됩니다. XY평면의 X축 기준이 아닌 다른 기준으로 변경 하고자 할때는 qmc.azimuth(축1,축2); 로 작성할 수 있습니다. # 동작 확인
이렇게 X,Y,Z 값을 통해 방위각을 도출 할 수 있습니다. 감사합니다. 
|






최신댓글